
 —Ä—É—Ā—Ā–ļ–ł–Ļ
—Ä—É—Ā—Ā–ļ–ł–Ļ









–ü–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ—č–Ļ –ľ–į–≥–Ĺ–ł—ā–Ĺ—č–Ļ —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–Ĺ—č–Ļ –ľ–ĺ—ā–ĺ—Ä
–ě—Ā–Ĺ–ĺ–≤–Ĺ–ĺ–Ķ —Ä–į–∑–Ľ–ł—á–ł–Ķ –ľ–Ķ–∂–ī—É –Ņ–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ—č–ľ –ľ–į–≥–Ĺ–ł—ā–ĺ–ľ —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–Ĺ–ĺ–≥–ĺ –ľ–ĺ—ā–ĺ—Ä–į (PMSM) –ł –ł–Ĺ–ī—É–ļ—Ü–ł–ĺ–Ĺ–Ĺ—č–Ļ –ī–≤–ł–≥–į—ā–Ķ–Ľ—Ć –Ĺ–į—Ö–ĺ–ī–ł—ā—Ā—Ź –≤ —Ä–ĺ—ā–ĺ—Ä. –ł–∑—É—á–Ķ–Ĺ–ł–Ķ 1. –Ņ–ĺ–ļ–į–∑–į—ā—Ć, —á—ā–ĺ PMSM –ł–ľ–Ķ–Ķ—ā –ź–Ě —ć—Ą—Ą–Ķ–ļ—ā–ł–≤–Ĺ–ĺ—Ā—ā—Ć –Ņ—Ä–ł–Ī–Ľ–ł–∑–ł—ā–Ķ–Ľ—Ć–Ĺ–ĺ 2% –Ī–ĺ–Ľ—Ć—ą–Ķ —á–Ķ–ľ –≤—č—Ā–ĺ–ļ–ĺ—ć—Ą—Ą–Ķ–ļ—ā–ł–≤–Ĺ—č–Ļ (IE3) –ė–Ĺ–ī—É–ļ—Ü–ł–ĺ–Ĺ–Ĺ—č–Ļ —ć–Ľ–Ķ–ļ—ā—Ä–ĺ–ī–≤–ł–≥–į—ā–Ķ–Ľ—Ć, –Ņ—Ä–ł —É—Ā–Ľ–ĺ–≤–ł–ł, —á—ā–ĺ —Ā—ā–į—ā–ĺ—Ä –ł–ľ–Ķ–Ķ—ā —ā–ĺ—ā –∂–Ķ –ī–ł–∑–į–Ļ–Ĺ, –ł —ā–ĺ –∂–Ķ —Ā–į–ľ–ĺ–Ķ –ü–Ķ—Ä–Ķ–ľ–Ķ–Ĺ–Ĺ—č–Ļ —á–į—Ā—ā–ĺ—ā–Ĺ—č–Ļ –Ņ—Ä–ł–≤–ĺ–ī –ł—Ā–Ņ–ĺ–Ľ—Ć–∑—É–Ķ—ā—Ā—Ź –ī–Ľ—Ź –ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ć. –í —ć—ā–ĺ–ľ —Ā–Ľ—É—á–į–Ķ –Ņ–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ—č–Ķ –ľ–į–≥–Ĺ–ł—ā–Ĺ—č–Ķ —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–Ĺ—č–Ķ —ć–Ľ–Ķ–ļ—ā—Ä–ĺ–ī–≤–ł–≥–į—ā–Ķ–Ľ–ł –Ņ–ĺ —Ā—Ä–į–≤–Ĺ–Ķ–Ĺ–ł—é —Ā –ī—Ä—É–≥–ł–ľ–ł —ć–Ľ–Ķ–ļ—ā—Ä–ĺ–ī–≤–ł–≥–į—ā–Ķ–Ľ—Ź–ľ–ł –ł–ľ–Ķ—é—ā –Ľ—É—á—ą–ł–Ķ –Ņ—Ä–ĺ–ł–∑–≤–ĺ–ī–ł—ā–Ķ–Ľ—Ć–Ĺ–ĺ—Ā—ā—Ć: Power / –ĺ–Ī—ä–Ķ–ľ, –ļ—Ä—É—ā—Ź—Č–ł–Ļ –ľ–ĺ–ľ–Ķ–Ĺ—ā / –ł–Ĺ–Ķ—Ä—Ü–ł—Ź –ł —ā. –Ē.
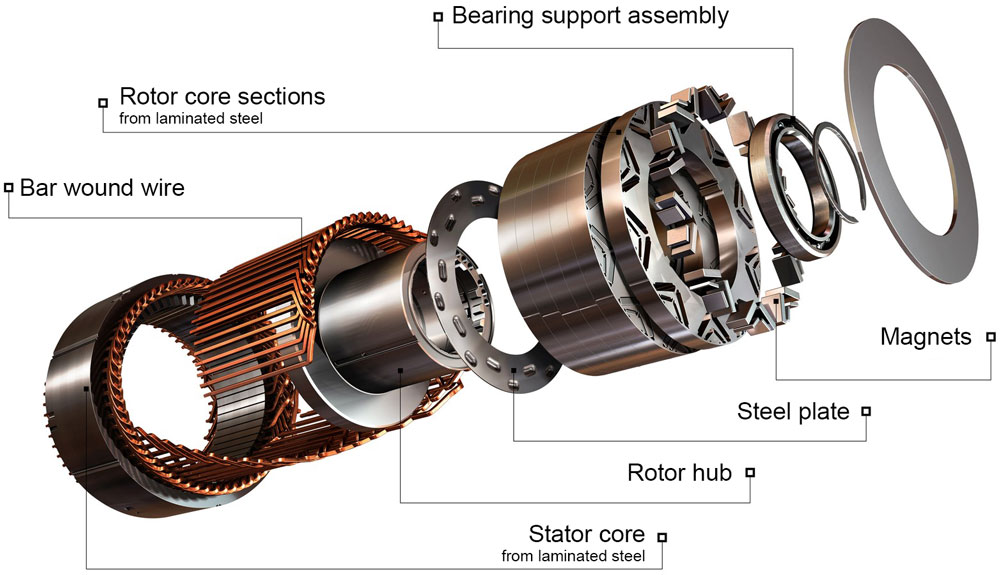
–ü–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ—č–Ļ —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–Ĺ—č–Ļ –ľ–ĺ—ā–ĺ—Ä –ľ–į–≥–Ĺ–ł—ā–į, –ļ–į–ļ –ł –Ľ—é–Ī–ĺ–Ļ –≤—Ä–į—Č–į—é—Č–ł–Ļ—Ā—Ź —ć–Ľ–Ķ–ļ—ā—Ä–ĺ–ī–≤–ł–≥–į—ā–Ķ–Ľ—Ć—Ā–ĺ—Ā—ā–ĺ–ł—ā –ł–∑ —Ä–ĺ—ā–ĺ—Ä–į –ł —Ā—ā–į—ā–ĺ—Ä–į. –°—ā–į—ā–ĺ—Ä —Ź–≤–Ľ—Ź–Ķ—ā—Ā—Ź —Ą–ł–ļ—Ā–ł—Ä–ĺ–≤–į–Ĺ–Ĺ—č–ľ —á–į—Ā—ā—Ć. –†–ĺ—ā–ĺ—Ä –≤—Ä–į—Č–į–Ķ—ā—Ā—Ź —á–į—Ā—ā—Ć.
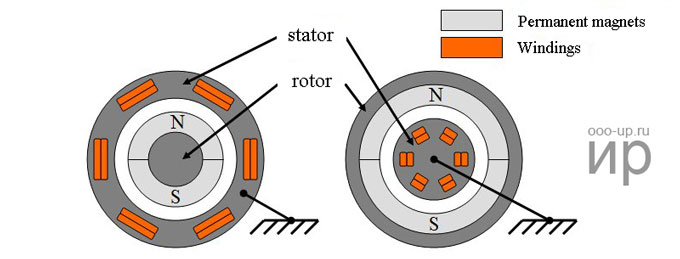
–ö–į–ļ –Ņ—Ä–į–≤–ł–Ľ–ĺ, —Ä–ĺ—ā–ĺ—Ä —Ä–į—Ā–Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ –≤–Ĺ—É—ā—Ä–ł —Ā—ā–į—ā–ĺ—Ä–į —ć–Ľ–Ķ–ļ—ā—Ä–ĺ–ī–≤–ł–≥–į—ā–Ķ–Ľ—Ź, –Ķ—Ā—ā—Ć —ā–į–ļ–∂–Ķ —Ā—ā—Ä—É–ļ—ā—É—Ä—č —Ā –≤–Ĺ–Ķ—ą–Ĺ–ł–ľ —Ä–ĺ—ā–ĺ—Ä–ĺ–ľ - –Ĺ–į–ł–∑–Ĺ–į–Ĺ–ļ—É —ć–Ľ–Ķ–ļ—ā—Ä–ł—á–Ķ—Ā–ļ–ł–Ķ –ī–≤–ł–≥–į—ā–Ķ–Ľ–ł.
–Ę–ĺ —Ä–ĺ—ā–ĺ—Ä—Ā–ĺ—Ā—ā–ĺ–ł—ā –ł–∑ –Ņ–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ—č—Ö –ľ–į–≥–Ĺ–ł—ā–ĺ–≤. –ú–į—ā–Ķ—Ä–ł–į–Ľ—č —Ā –≤—č—Ā–ĺ–ļ–ĺ–Ļ –Ņ—Ä–ł–Ĺ—É–ī–ł—ā–Ķ–Ľ—Ć–Ĺ–ĺ–Ļ —Ā–ł–Ľ–ĺ–Ļ –ł—Ā–Ņ–ĺ–Ľ—Ć–∑—É—é—ā—Ā—Ź –ļ–į–ļ –Ņ–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ—č–Ķ –ľ–į–≥–Ĺ–ł—ā—č.
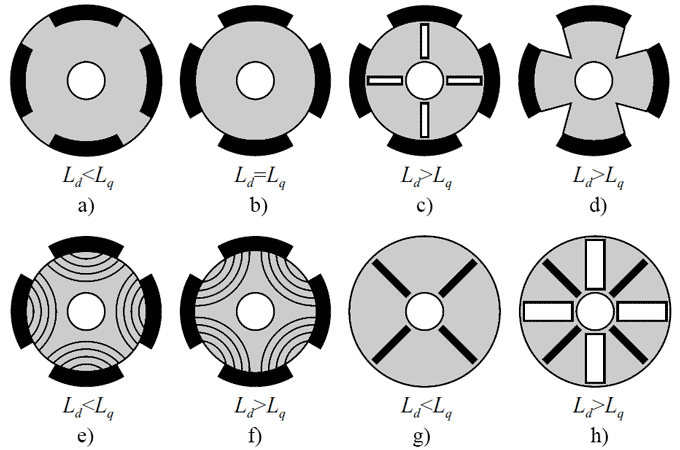
—ć–Ľ–Ķ–ļ—ā—Ä–ĺ–ī–≤–ł–≥–į—ā–Ķ–Ľ—Ć —Ā –Ĺ–Ķ—ć–Ľ–Ķ–ľ–Ķ–Ĺ—ā –ü–ĺ–Ľ—é—Ā–Ĺ—č–Ļ —Ä–ĺ—ā–ĺ—Ä –ł–ľ–Ķ–Ķ—ā –ĺ–ī–ł–Ĺ–į–ļ–ĺ–≤—É—é –Ņ—Ä—Ź–ľ—É—é –ł –ļ–≤–į–ī—Ä–į—ā—É—Ä–Ĺ—č–Ļ –ł–Ĺ–ī—É–ļ—Ü–ł—é L –Ņ–ĺ–ī—Ä–į–∑–ī–Ķ–Ľ–Ķ–Ĺ–ł–Ķ = . –Ľ–ł–≤–Ĺ—Ź –≤–ĺ–Ĺ , –≤ —ā–ĺ –≤—Ä–Ķ–ľ—Ź –ļ–į–ļ –Ē–Ľ—Ź —ć–Ľ–Ķ–ļ—ā—Ä–ĺ–ī–≤–ł–≥–į—ā–Ķ–Ľ—Ź —Ā –Ĺ–Ķ–Ī—Ä–Ķ–∂–Ĺ—č–ľ –Ņ–ĺ–Ľ—é—Ā–ĺ–ľ —Ä–ĺ—ā–ĺ—Ä–ĺ–ľ –ļ–≤–į–ī—Ä–į—ā—É—Ä–į –Ĺ–Ķ —Ä–į–≤–Ĺ–į –Ņ—Ä—Ź–ľ–ĺ–Ļ –Ľ. –≤–ĺ–Ĺ ‚Ȇ . –Ľ–ł–≤–Ĺ—Ź –Ņ–ĺ–ī—Ä–į–∑–ī–Ķ–Ľ–Ķ–Ĺ–ł–Ķ . .
–Ę–ĺ —Ā—ā–į—ā–ĺ—Ä—Ā–ĺ—Ā—ā–ĺ–ł—ā –ł–∑ –≤–Ĺ–Ķ—ą–Ĺ–Ķ–Ļ —Ä–į–ľ—č –ł —Ā–Ķ—Ä–ī–Ķ—á–Ĺ–ł–ļ–į —Ā –ĺ–Ī–ľ–ĺ—ā–ļ–ł. –°–į–ľ—č–Ļ —Ä–į—Ā–Ņ—Ä–ĺ—Ā—ā—Ä–į–Ĺ–Ķ–Ĺ–Ĺ—č–Ļ –ī–ł–∑–į–Ļ–Ĺ —Ā –ī–≤–į- –ł —ā—Ä–Ķ—Ö—Ą–į–∑–Ĺ—č–Ļ –ĺ–Ī–ľ–ĺ—ā–ļ–į.
—Ä–į—Ā–Ņ—Ä–Ķ–ī–Ķ–Ľ–Ķ–Ĺ–ü–ĺ–∑–≤–ĺ–Ĺ–ł—ā–Ķ —ā–į–ļ—É—é ‚Äč‚Äč–ĺ–Ī–ľ–ĺ—ā–ļ—É, –≤ –ļ–ĺ—ā–ĺ—Ä–ĺ–Ļ –ļ–ĺ–Ľ–ł—á–Ķ—Ā—ā–≤–ĺ —Ā–Ľ–ĺ—ā–ĺ–≤ –Ĺ–į –ü–ĺ–Ľ—é—Ā –ł —Ą–į–∑–į q = 2, 3, ...., –ļ.
—Ā–ĺ—Ā—Ä–Ķ–ī–ĺ—ā–ĺ—á–ł—ā—Ć—Ā—Ź –Ĺ–į–∑—č–≤–į–Ķ—ā—Ā—Ź —ā–į–ļ–į—Ź –ĺ–Ī–ľ–ĺ—ā–ļ–į, –≤ –ļ–ĺ—ā–ĺ—Ä–ĺ–Ļ –ļ–ĺ–Ľ–ł—á–Ķ—Ā—ā–≤–ĺ —Ā–Ľ–ĺ—ā–ĺ–≤ –Ĺ–į –ü–ĺ–Ľ—é—Ā –ł —Ą–į–∑–į q = 1. . –í —ć—ā–ĺ–ľ —Ā–Ľ—É—á–į–Ķ —Ā–Ľ–ĺ—ā—č —Ä–į–≤–Ĺ–ĺ–ľ–Ķ—Ä–Ĺ–ĺ —Ä–į—Ā–Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ—č –≤–ĺ–ļ—Ä—É–≥ –ĺ–ļ—Ä—É–∂–Ĺ–ĺ—Ā—ā–ł –°—ā–į—ā–ĺ—Ä–į. –Ē–≤–Ķ –ļ–į—ā—É—ą–ļ–ł, –ĺ–Ī—Ä–į–∑—É—é—Č–ł–Ķ –Ĺ–į–ľ–ĺ—ā–ļ–ł, –ľ–ĺ–≥—É—ā –Ī—č—ā—Ć –Ņ–ĺ–ī–ļ–Ľ—é—á–Ķ–Ĺ—č –ļ–į–ļ –≤ —Ā–Ķ—Ä–ł–ł, —ā–į–ļ –ł –≤ –Ņ–į—Ä–į–Ľ–Ľ–Ķ–Ľ—Ć–Ĺ–ĺ. –ě—Ā–Ĺ–ĺ–≤–Ĺ—č–ľ –Ĺ–Ķ–ī–ĺ—Ā—ā–į—ā–ļ–ĺ–ľ —ā–į–ļ–ł—Ö –ĺ–Ī–ľ–ĺ—ā–ĺ–ļ —Ź–≤–Ľ—Ź–Ķ—ā—Ā—Ź –Ĺ–Ķ–≤–ĺ–∑–ľ–ĺ–∂–Ĺ–ĺ—Ā—ā—Ć –≤–Ľ–ł—Ź—ā—Ć –Ĺ–į —Ą–ĺ—Ä–ľ—É –ļ—Ä–ł–≤–ĺ–Ļ –≠–Ē–° [2] . .
–§–ĺ—Ä–ľ–į –ļ—Ä–ł–≤–ĺ–Ļ –≠–Ē–° –≤ –Ņ—Ä–ĺ–≤–ĺ–ī–Ĺ–ł–ļ–Ķ –ĺ–Ņ—Ä–Ķ–ī–Ķ–Ľ—Ź–Ķ—ā—Ā—Ź –ļ—Ä–ł–≤–ĺ–Ļ —Ä–į—Ā–Ņ—Ä–Ķ–ī–Ķ–Ľ–Ķ–Ĺ–ł—Ź –ľ–į–≥–Ĺ–ł—ā–Ĺ–ĺ–Ļ –ł–Ĺ–ī—É–ļ—Ü–ł–ł –≤ –∑–į–∑–ĺ—Ä–Ķ –≤–ĺ–ļ—Ä—É–≥ —Ā—ā–į—ā–ĺ—Ä–į –ě–ļ—Ä—É–∂–Ĺ–ĺ—Ā—ā—Ć.
–ė–∑–≤–Ķ—Ā—ā–Ĺ–ĺ, —á—ā–ĺ –ľ–į–≥–Ĺ–ł—ā–Ĺ–į—Ź –ł–Ĺ–ī—É–ļ—Ü–ł—Ź –≤ –∑–į–∑–ĺ—Ä–Ķ –Ņ–ĺ–ī –∑–į–ľ–Ķ—ā–Ĺ—č–ľ –Ņ–ĺ–Ľ—é—Ā–ĺ–ľ —Ä–ĺ—ā–ĺ—Ä–į –ł–ľ–Ķ–Ķ—ā —ā—Ä–į–Ņ–Ķ—Ü–ł–Ķ–≤–ł–ī–Ĺ—É—é —Ą–ĺ—Ä–ľ—É. –≠–Ē–ě, –ł–Ĺ–ī—É—Ü–ł—Ä–ĺ–≤–į–Ĺ–Ĺ–į—Ź –≤ –Ņ—Ä–ĺ–≤–ĺ–ī–Ĺ–ł–ļ–Ķ, –ł–ľ–Ķ–Ķ—ā —ā–ĺ –∂–Ķ —Ā–į–ľ–ĺ–Ķ –§–ĺ—Ä–ľ–į. –ē—Ā–Ľ–ł . –Ě–Ķ–ĺ–Ī—Ö–ĺ–ī–ł–ľ–ĺ —Ā–ĺ–∑–ī–į—ā—Ć —Ā–ł–Ĺ—É—Ā–ĺ–ł–ī–į–Ľ—Ć–Ĺ—č–Ļ EMF, —ā–ĺ —Ā–ĺ–≤–Ķ—ā—č –Ņ–ĺ–Ľ—é—Ā–į –ī–į–Ĺ—č —ā–į–ļ–ĺ–Ļ —Ą–ĺ—Ä–ľ—č, —á—ā–ĺ –ļ—Ä–ł–≤–į—Ź —Ä–į—Ā–Ņ—Ä–Ķ–ī–Ķ–Ľ–Ķ–Ĺ–ł—Ź –ł–Ĺ–ī—É–ļ—Ü–ł–ł –Ī—č—ā—Ć —Ä—Ź–ī–ĺ–ľ —Ā —Ā–ł–Ĺ—É—Ā–ĺ–ł–ī–į–Ľ—Ć–Ĺ—č–Ļ. –≠—ā–ĺ . —Ā–ĺ–ī–Ķ–Ļ—Ā—ā–≤—É–Ķ—ā —Ä–į–∑–≤–ĺ—Ä–ĺ–≤—č–ľ –ļ–ĺ–Ĺ—á–ł–ļ–į–ľ –Ņ–ĺ–Ľ—é—Ā–ĺ–≤ —Ä–ĺ—ā–ĺ—Ä–į [2] . .
–Ę–ĺ –ü—Ä–ł–Ĺ—Ü–ł–Ņ —Ä–į–Ī–ĺ—ā—č —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–Ĺ–ĺ–≥–ĺ –ľ–ĺ—ā–ĺ—Ä–į –ĺ—Ā–Ĺ–ĺ–≤–į–Ĺ –Ĺ–į –≤–∑–į–ł–ľ–ĺ–ī–Ķ–Ļ—Ā—ā–≤–ł–ł –≤—Ä–į—Č–į—é—Č–Ķ–≥–ĺ—Ā—Ź –ľ–į–≥–Ĺ–ł—ā–Ĺ–ĺ–≥–ĺ –Ņ–ĺ–Ľ—Ź —Ā—ā–į—ā–ĺ—Ä–į –ł –Ņ–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ–ĺ–≥–ĺ –ľ–į–≥–Ĺ–ł—ā–Ĺ–ĺ–≥–ĺ –Ņ–ĺ–Ľ—Ź —Ä–ĺ—ā–ĺ—Ä. –Ę–ĺ –ö–ĺ–Ĺ—Ü–Ķ–Ņ—Ü–ł—Ź –≤—Ä–į—Č–į—é—Č–Ķ–≥–ĺ—Ā—Ź –ľ–į–≥–Ĺ–ł—ā–Ĺ–ĺ–≥–ĺ –Ņ–ĺ–Ľ—Ź —Ā—ā–į—ā–ĺ—Ä–į —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–Ĺ–ĺ–≥–ĺ –ī–≤–ł–≥–į—ā–Ķ–Ľ—Ź —ā–į–ļ–ĺ–Ļ –∂–Ķ, –ļ–į–ļ —É —ā—Ä–Ķ—Ö—Ą–į–∑–Ĺ—č–Ļ –ė–Ĺ–ī—É–ļ—Ü–ł–ĺ–Ĺ–Ĺ—č–Ļ –ī–≤–ł–≥–į—ā–Ķ–Ľ—Ć . .
–ü—Ä–ł–Ĺ—Ü–ł–Ņ —Ä–į–Ī–ĺ—ā—č —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–Ĺ–ĺ–≥–ĺ –ī–≤–ł–≥–į—ā–Ķ–Ľ—Ź –ĺ—Ā–Ĺ–ĺ–≤–į–Ĺ –Ĺ–į –≤–∑–į–ł–ľ–ĺ–ī–Ķ–Ļ—Ā—ā–≤–ł–ł –≤—Ä–į—Č–Ķ–Ĺ–ł–Ķ –ľ–į–≥–Ĺ–ł—ā–Ĺ–ĺ–≥–ĺ –Ņ–ĺ–Ľ—Ź—Ā—ā–į—ā–ĺ—Ä–į –ł –Ņ–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ–ĺ–≥–ĺ –ľ–į–≥–Ĺ–ł—ā–Ĺ–ĺ–≥–ĺ –Ņ–ĺ–Ľ—Ź —Ä–ĺ—ā–ĺ—Ä.
–ú–į–≥–Ĺ–ł—ā–Ĺ–ĺ–Ķ –Ņ–ĺ–Ľ–Ķ —Ä–ĺ—ā–ĺ—Ä–į, –≤–∑–į–ł–ľ–ĺ–ī–Ķ–Ļ—Ā—ā–≤—É—é—Č–Ķ–Ķ —Ā —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–Ĺ—č–ľ –Ņ–Ķ—Ä–Ķ–ľ–Ķ–Ĺ–Ĺ—č–ľ —ā–ĺ–ļ–ĺ–ľ –ĺ–Ī–ľ–ĺ—ā–ĺ–ļ —Ā—ā–į—ā–ĺ—Ä–į, —Ā–ĺ–≥–Ľ–į—Ā–Ĺ–ĺ Ampere's –ó–į–ļ–ĺ–Ĺ, —Ā–ĺ–∑–ī–į–Ķ—ā –ļ—Ä—É—ā—Ź—Č–ł–Ļ –ľ–ĺ–ľ–Ķ–Ĺ—ā–∑–į—Ā—ā–į–≤–ł—ā—Ć —Ä–ĺ—ā–ĺ—Ä –≤—Ä–į—Č–į—ā—Ć—Ā—Ź ( –Ī–ĺ–Ľ–Ķ–Ķ ).
–ü–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ—č–Ķ –ľ–į–≥–Ĺ–ł—ā—č, —Ä–į—Ā–Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–Ĺ—č–Ķ –Ĺ–į —Ä–ĺ—ā–ĺ—Ä–Ķ PMSM –°–ĺ–∑–ī–į–Ļ—ā–Ķ –Ņ–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ–ĺ–Ķ –ľ–į–≥–Ĺ–ł—ā–Ĺ–ĺ–Ķ –Ņ–ĺ–Ľ–Ķ. –ü—Ä–ł —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–Ĺ–ĺ–Ļ —Ā–ļ–ĺ—Ä–ĺ—Ā—ā–ł –≤—Ä–į—Č–Ķ–Ĺ–ł—Ź —Ä–ĺ—ā–ĺ—Ä–į —Ā–ĺ —Ā—ā–į—ā–ĺ—Ä–ĺ–ľ –Ņ–ĺ–Ľ—Ź —Ä–ĺ—ā–ĺ—Ä–Ĺ—č–Ķ –Ņ–ĺ–Ľ—é—Ā –Ī–Ľ–ĺ–ļ–ł—Ä—É—é—ā —Ā –≤—Ä–į—Č–į—é—Č–ł–ľ—Ā—Ź –ľ–į–≥–Ĺ–ł—ā–Ĺ—č–ľ –Ņ–ĺ–Ľ–Ķ–ľ —Ā—ā–į—ā–ĺ—Ä–į. –í —Ā–≤—Ź–∑–ł —Ā —ć—ā–ł–ľ PMSM –Ĺ–Ķ –ľ–ĺ–∂–Ķ—ā . –Ě–į—á–į—ā—Ć —Ā–į–ľ –ļ–ĺ–≥–ī–į . –≠—ā–ĺ —Ā–≤—Ź–∑–į–Ĺ–ĺ –Ĺ–Ķ–Ņ–ĺ—Ā—Ä–Ķ–ī—Ā—ā–≤–Ķ–Ĺ–Ĺ–ĺ –ļ —ā—Ä–Ķ—Ö—Ą–į–∑–Ĺ–ĺ–Ļ –Ę–Ķ–ļ—É—Č–į—Ź —Ā–Ķ—ā—Ć (—ā–ĺ–ļ –ß–į—Ā—ā–ĺ—ā–į –≤ —ć–Ľ–Ķ–ļ—ā—Ä–ĺ—Ā–Ķ—ā–Ķ–≤–ĺ–Ļ —Ä–Ķ—ą–Ķ—ā–ļ–Ķ 50 –ď—Ü).
–ü–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ—č–Ļ —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–Ĺ—č–Ļ –ī–≤–ł–≥–į—ā–Ķ–Ľ—Ć –ľ–į–≥–Ĺ–ł—ā–į —ā—Ä–Ķ–Ī—É–Ķ—ā —Ā–ł—Ā—ā–Ķ–ľ—č —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź, –Ĺ–į–Ņ—Ä–ł–ľ–Ķ—Ä, –ü–Ķ—Ä–Ķ–ľ–Ķ–Ĺ–Ĺ—č–Ļ —á–į—Ā—ā–ĺ—ā–Ĺ—č–Ļ –Ņ—Ä–ł–≤–ĺ–ī–ł–Ľ–ł —Ā–Ķ—Ä–≤–ĺ–Ņ—Ä–ł–≤–ĺ–ī. –°—É—Č–Ķ—Ā—ā–≤—É–Ķ—ā –Ī–ĺ–Ľ—Ć—ą–ĺ–Ķ –ļ–ĺ–Ľ–ł—á–Ķ—Ā—ā–≤–ĺ –ľ–Ķ—ā–ĺ–ī–ĺ–≤ –ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ź, —Ä–Ķ–į–Ľ–ł–∑–ĺ–≤–į–Ĺ–Ĺ–ĺ–Ķ —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł–Ķ —Ā–ł—Ā—ā–Ķ–ľ—č. –í—č–Ī–ĺ—Ä –ľ–Ķ—ā–ĺ–ī–į –ĺ–Ņ—ā–ł–ľ–į–Ľ—Ć–Ĺ–ĺ–≥–ĺ —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź –≤ –ĺ—Ā–Ĺ–ĺ–≤–Ĺ–ĺ–ľ –∑–į–≤–ł—Ā–ł—ā –ĺ—ā –∑–į–ī–į—á–ł, –ļ–ĺ—ā–ĺ—Ä–į—Ź –Ņ–ĺ–ľ–Ķ—Č–į–Ķ—ā—Ā—Ź –Ņ–Ķ—Ä–Ķ–ī Electric –Ņ—Ä–ł–≤–ĺ–ī. –ě—Ā–Ĺ–ĺ–≤–Ĺ—č–Ķ –ľ–Ķ—ā–ĺ–ī—č —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–Ĺ—č–ľ –ľ–ĺ—ā–ĺ—Ä–ĺ–ľ –Ņ–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ–ĺ–≥–ĺ –ľ–į–≥–Ĺ–ł—ā–į –Ņ–ĺ–ļ–į–∑–į–Ĺ—č –≤ —ā–į–Ī–Ľ–ł—Ü–Ķ –Ĺ–ł–∂–Ķ.
| –ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ć | –Ņ—Ä–Ķ–ł–ľ—É—Č–Ķ—Ā—ā–≤–į | –Ě–Ķ–ī–ĺ—Ā—ā–į—ā–ļ–ł | |||
|---|---|---|---|---|---|
| —Ā–ļ–į–Ľ—Ź—Ä–Ĺ—č–Ļ | –ü—Ä–ĺ—Ā—ā–į—Ź —Ā—Ö–Ķ–ľ–į —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź | –ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ć –Ĺ–Ķ —Ź–≤–Ľ—Ź–Ķ—ā—Ā—Ź –ĺ–Ņ—ā–ł–ľ–į–Ľ—Ć–Ĺ—č–ľ, –Ĺ–Ķ –Ņ–ĺ–ī—Ö–ĺ–ī–ł—ā –ī–Ľ—Ź –∑–į–ī–į—á –≥–ī–Ķ –ü–Ķ—Ä–Ķ–ľ–Ķ–Ĺ–Ĺ–į—Ź –Ĺ–į–≥—Ä—É–∑–ļ–į, –Ņ–ĺ—ā–Ķ—Ä—Ź —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź –≤–ĺ–∑–ľ–ĺ–∂–Ĺ–į | |||
| –° –ī–į—ā—á–ł–ļ–ĺ–ľ –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł—Ź | –ď–Ľ–į–ī–ļ–į—Ź –ł —ā–ĺ—á–Ĺ–į—Ź –Ĺ–į—Ā—ā—Ä–ĺ–Ļ–ļ–į –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł—Ź —Ä–ĺ—ā–ĺ—Ä–į –ł —Ā–ļ–ĺ—Ä–ĺ—Ā—ā—Ć –≤—Ä–į—Č–Ķ–Ĺ–ł—Ź –ī–≤–ł–≥–į—ā–Ķ–Ľ—Ź, –Ī–ĺ–Ľ—Ć—ą–ĺ–Ļ –ī–ł–į–Ņ–į–∑–ĺ–Ĺ —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź | –Ę—Ä–Ķ–Ī—É–Ķ—ā—Ā—Ź –ī–į—ā—á–ł–ļ –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł—Ź —Ä–ĺ—ā–ĺ—Ä–į –ł –ľ–ĺ—Č–Ĺ—č–Ļ –ú–ł–ļ—Ä–ĺ–ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ–Ľ–Ķ—Ä –í–Ĺ—É—ā—Ä–ł —Ā–ł—Ā—ā–Ķ–ľ—č —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź | |||
| –Ď–Ķ–∑ . –Ē–į—ā—á–ł–ļ –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł—Ź | –Ē–į—ā—á–ł–ļ –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł—Ź —Ä–ĺ—ā–ĺ—Ä–į –Ĺ–Ķ —ā—Ä–Ķ–Ī—É–Ķ—ā—Ā—Ź. –≥–Ľ–į–ī–ļ–į—Ź –ł —ā–ĺ—á–Ĺ–į—Ź –Ĺ–į—Ā—ā—Ä–ĺ–Ļ–ļ–į –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł—Ź —Ä–ĺ—ā–ĺ—Ä–į –ł —Ā–ļ–ĺ—Ä–ĺ—Ā—ā—Ć –≤—Ä–į—Č–Ķ–Ĺ–ł—Ź –ī–≤–ł–≥–į—ā–Ķ–Ľ—Ź, –Ī–ĺ–Ľ—Ć—ą–ĺ–Ļ –ī–ł–į–Ņ–į–∑–ĺ–Ĺ —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź, –Ĺ–ĺ –ľ–Ķ–Ĺ—Ć—ą–Ķ —á–Ķ–ľ —Ā –ī–į—ā—á–ł–ļ–ĺ–ľ –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł—Ź | –Ē–į—ā—á–ł–ļ . –Ņ–ĺ–Ľ–Ķ –ĺ—Ä–ł–Ķ–Ĺ—ā–ł—Ä–ĺ–≤–į–Ĺ–Ĺ—č–Ļ –ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ć –Ĺ–į–ī –ü–ĺ–Ľ–Ĺ—č–Ļ –ī–ł–į–Ņ–į–∑–ĺ–Ĺ —Ā–ļ–ĺ—Ä–ĺ—Ā—ā–Ķ–Ļ –≤–ĺ–∑–ľ–ĺ–∂–Ĺ–ĺ —ā–ĺ–Ľ—Ć–ļ–ĺ –ī–Ľ—Ź PMSM –° –Ĺ–Ķ–Ī—Ä–Ķ–∂–Ĺ—č–ľ —Ä–ĺ—ā–ĺ—Ä–ĺ–ľ –Ņ–ĺ–Ľ—é—Ā–į —ā—Ä–Ķ–Ī—É–Ķ—ā—Ā—Ź –ľ–ĺ—Č–Ĺ–į—Ź —Ā–ł—Ā—ā–Ķ–ľ–į —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź | |||
| –Ņ—Ä—Ź–ľ–ĺ–Ļ –ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ć –ļ—Ä—É—ā—Ź—Č–Ķ–≥–ĺ –ľ–ĺ–ľ–Ķ–Ĺ—ā–į | –ü—Ä–ĺ—Ā—ā–į—Ź —Ü–Ķ–Ņ—Ć —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź, —Ö–ĺ—Ä–ĺ—ą–į—Ź –ī–ł–Ĺ–į–ľ–ł—á–Ķ—Ā–ļ–į—Ź –Ņ—Ä–ĺ–ł–∑–≤–ĺ–ī–ł—ā–Ķ–Ľ—Ć–Ĺ–ĺ—Ā—ā—Ć, —ą–ł—Ä–ĺ–ļ–ł–Ļ –ī–ł–į–Ņ–į–∑–ĺ–Ĺ —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź, –ī–į—ā—á–ł–ļ –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł—Ź —Ä–ĺ—ā–ĺ—Ä–į –Ĺ–Ķ —ā—Ä–Ķ–Ī—É–Ķ—ā—Ā—Ź | –í—č—Ā–ĺ–ļ–ł–Ļ –ļ—Ä—É—ā—Ź—Č–ł–Ļ –ľ–ĺ–ľ–Ķ–Ĺ—ā –ł —ā–Ķ–ļ—É—Č–į—Ź –Ņ—É–Ľ—Ć—Ā–į—Ü–ł—Ź | |||
| –ĺ—ā–ļ—Ä—č—ā—č–Ļ —Ü–ł–ļ–Ľ | –ü—Ä–ĺ—Ā—ā–į—Ź —Ā—Ö–Ķ–ľ–į —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź | –ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ć –Ĺ–Ķ —Ź–≤–Ľ—Ź–Ķ—ā—Ā—Ź –ĺ–Ņ—ā–ł–ľ–į–Ľ—Ć–Ĺ—č–ľ, –Ĺ–Ķ –Ņ–ĺ–ī—Ö–ĺ–ī–ł—ā –ī–Ľ—Ź –∑–į–ī–į—á –≥–ī–Ķ –ü–Ķ—Ä–Ķ–ľ–Ķ–Ĺ–Ĺ–į—Ź –Ĺ–į–≥—Ä—É–∑–ļ–į, –Ņ–ĺ—ā–Ķ—Ä—Ź —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź –≤–ĺ–∑–ľ–ĺ–∂–Ĺ–į | |||
| –° –ī–į—ā—á–ł–ļ–ĺ–ľ –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł—Ź (–∑–į–Ľ —Ā–Ķ–Ĺ—Ā–ĺ—Ä—č) | –ü—Ä–ĺ—Ā—ā–į—Ź —Ā—Ö–Ķ–ľ–į —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź | –Ē–į—ā—á–ł–ļ–ł –•–ĺ–Ľ–Ľ–į –Ę—Ä–Ķ–Ī—É–Ķ—ā—Ā—Ź. –ē—Ā—ā—Ć –ļ—Ä—É—ā—Ź—Č–ł–Ļ –ľ–ĺ–ľ–Ķ–Ĺ—ā —Ä—Ź–Ī—Ć. –ü—Ä–Ķ–ī–Ĺ–į–∑–Ĺ–į—á–Ķ–Ĺ –ī–Ľ—Ź —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź PMSM —Ā —ā—Ä–į–Ņ–Ķ—Ü–ł–Ķ–ľ–į–Ľ—Ć–Ĺ–ĺ–Ļ —Ā–Ņ–ł–Ĺ–ĺ–Ļ –≠–ú–§, –ö–ĺ–≥–ī–į –ö–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ć PMSM –° —Ā–ł–Ĺ—É—Ā–ĺ–ł–ī–į–Ľ—Ć–Ĺ–ĺ–Ļ —Ā–Ņ–ł–Ĺ–ĺ–Ļ EMF, —Ā—Ä–Ķ–ī–Ĺ–ł–Ļ –ļ—Ä—É—ā—Ź—Č–ł–Ļ –ľ–ĺ–ľ–Ķ–Ĺ—ā –Ĺ–ł–∂–Ķ 5%. | |||
| –Ď–Ķ–∑ . –ī–į—ā—á–ł–ļ | –Ę—Ä–Ķ–Ī—É–Ķ—ā—Ā—Ź –Ī–ĺ–Ľ–Ķ–Ķ –ľ–ĺ—Č–Ĺ–į—Ź —Ā–ł—Ā—ā–Ķ–ľ–į —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź | –Ĺ–Ķ –Ņ–ĺ–ī—Ö–ĺ–ī–ł—ā –ī–Ľ—Ź –Ĺ–ł–∑–ļ–ĺ–Ļ —Ā–ļ–ĺ—Ä–ĺ—Ā—ā–ł –ě–Ņ–Ķ—Ä–į—Ü–ł—Ź. –ē—Ā—ā—Ć –ļ—Ä—É—ā—Ź—Č–ł–Ļ –ľ–ĺ–ľ–Ķ–Ĺ—ā —Ä—Ź–Ī—Ć. –ü—Ä–Ķ–ī–Ĺ–į–∑–Ĺ–į—á–Ķ–Ĺ –ī–Ľ—Ź —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź PMSM —Ā —ā—Ä–į–Ņ–Ķ—Ü–ł–Ķ–ľ–į–Ľ—Ć–Ĺ–ĺ–Ļ —Ā–Ņ–ł–Ĺ–ĺ–Ļ –≠–ú–§, –ö–ĺ–≥–ī–į –ö–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ć PMSM –° —Ā–ł–Ĺ—É—Ā–ĺ–ł–ī–į–Ľ—Ć–Ĺ–ĺ–Ļ —Ā–Ņ–ł–Ĺ–ĺ–Ļ EMF, —Ā—Ä–Ķ–ī–Ĺ–ł–Ļ –ļ—Ä—É—ā—Ź—Č–ł–Ļ –ľ–ĺ–ľ–Ķ–Ĺ—ā –Ĺ–ł–∂–Ķ 5%. | |||
–ö . –†–Ķ—ą–į—ā—Ć –Ņ—Ä–ĺ—Ā—ā—č–Ķ –∑–į–ī–į—á–ł –ĺ–Ī—č—á–Ĺ–ĺ –ł—Ā–Ņ–ĺ–Ľ—Ć–∑—É—é—ā—Ā—Ź —ā—Ä–į–Ņ–Ķ—Ü–ł–Ķ–≤–ł–ī–Ĺ—č–ľ —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł–Ķ–ľ —Ā –ī–į—ā—á–ł–ļ–į–ľ–ł –•–ĺ–Ľ–Ľ–į (–ī–Ľ—Ź –ü—Ä–ł–ľ–Ķ—Ä, –ļ–ĺ–ľ–Ņ—Ć—é—ā–Ķ—Ä –≤–Ķ–Ĺ—ā–ł–Ľ—Ź—ā–ĺ—Ä—č). –ö . –†–Ķ—ą–į—ā—Ć –Ņ—Ä–ĺ–Ī–Ľ–Ķ–ľ—č, —ā—Ä–Ķ–Ī—É—é—Č–ł–Ķ –ľ–į–ļ—Ā–ł–ľ–į–Ľ—Ć–Ĺ–ĺ–Ļ –Ņ—Ä–ĺ–ł–∑–≤–ĺ–ī–ł—ā–Ķ–Ľ—Ć–Ĺ–ĺ—Ā—ā–ł –ĺ—ā —ć–Ľ–Ķ–ļ—ā—Ä–ĺ–Ņ—Ä–ł–≤–ĺ–ī–į, –ĺ—Ä–ł–Ķ–Ĺ—ā–ł—Ä–ĺ–≤–į–Ĺ –Ĺ–į –Ņ–ĺ–Ľ–Ķ –ö–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ć –ĺ–Ī—č—á–Ĺ–ĺ –≤—č–Ī—Ä–į–Ĺ.
–ě–ī–Ĺ–ł–ľ –ł–∑ –Ņ—Ä–ĺ—Ā—ā–Ķ–Ļ—ą–ł—Ö –ľ–Ķ—ā–ĺ–ī–ĺ–≤ –ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ź —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–Ĺ–ĺ–≥–ĺ –ľ–ĺ—ā–ĺ—Ä–į –Ņ–ĺ—Ā—ā–ĺ—Ź–Ĺ–Ĺ–ĺ–≥–ĺ –ľ–į–≥–Ĺ–ł—ā–į —Ź–≤–Ľ—Ź–Ķ—ā—Ā—Ź - —ā—Ä–į–Ņ–Ķ—Ü–ł–Ķ–≤–ł–ī–Ĺ—č–Ļ –ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ć. –Ę—Ä–į–Ņ–Ķ—Ü–ł–Ķ–≤–ł–ī–Ĺ–ĺ–Ķ —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł–Ķ –ł—Ā–Ņ–ĺ–Ľ—Ć–∑—É–Ķ—ā—Ā—Ź –ī–Ľ—Ź —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź PMSM —Ā —ā—Ä–į–Ņ–Ķ—Ü–ł–Ķ–≤–ł–ī–Ĺ–ĺ–Ļ —Ā–Ņ–ł–Ĺ–ĺ–Ļ EMF. –í —ā–ĺ –∂–Ķ –≤—Ä–Ķ–ľ—Ź —ć—ā–ĺ—ā –ľ–Ķ—ā–ĺ–ī —ā–į–ļ–∂–Ķ –Ņ–ĺ–∑–≤–ĺ–Ľ—Ź–Ķ—ā —É–Ņ—Ä–į–≤–Ľ—Ź—ā—Ć PMSM –° —Ā–ł–Ĺ—É—Ā–ĺ–ł–ī–į–Ľ—Ć–Ĺ–ĺ–Ļ —Ā–Ņ–ł–Ĺ–ĺ–Ļ EMF, –Ĺ–ĺ –∑–į—ā–Ķ–ľ —Ā—Ä–Ķ–ī–Ĺ–ł–Ļ –ļ—Ä—É—ā—Ź—Č–ł–Ļ –ľ–ĺ–ľ–Ķ–Ĺ—ā —ć–Ľ–Ķ–ļ—ā—Ä–ł—á–Ķ—Ā–ļ–ĺ–≥–ĺ –Ņ—Ä–ł–≤–ĺ–ī–į –Ī—É–ī–Ķ—ā –Ĺ–ł–∂–Ķ –Ĺ–į 5%, –į –ļ—Ä—É—ā—Ź—Č–ł–Ļ –ľ–ĺ–ľ–Ķ–Ĺ—ā –Ī—É–ī–Ķ—ā 14% –ľ–į–ļ—Ā–ł–ľ–į–Ľ—Ć–Ĺ–ĺ–≥–ĺ —Ü–Ķ–Ĺ–Ĺ–ĺ—Ā—ā—Ć. –°—É—Č–Ķ—Ā—ā–≤—É–Ķ—ā —ā—Ä–į–Ņ–Ķ—Ü–ł–Ķ–≤–ł–ī–Ĺ–ĺ–Ķ —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł–Ķ –Ī–Ķ–∑ –ĺ–Ī—Ä–į—ā–Ĺ–ĺ–Ļ —Ā–≤—Ź–∑–ł –ł –ĺ–Ī—Ä–į—ā–Ĺ–ĺ–Ļ —Ā–≤—Ź–∑–ł —Ä–ĺ—ā–ĺ—Ä–ĺ–ľ –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł–Ķ.
–Ę–ĺ –£–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł–Ķ –ĺ—ā–ļ—Ä—č—ā—č–ľ –ļ–ĺ–Ĺ—ā—É—Ä–ĺ–ľ (–Ī–Ķ–∑ –ě–Ī—Ä–į—ā–Ĺ–į—Ź —Ā–≤—Ź–∑—Ć) –Ĺ–Ķ —Ź–≤–Ľ—Ź–Ķ—ā—Ā—Ź –ĺ–Ņ—ā–ł–ľ–į–Ľ—Ć–Ĺ—č–ľ –ł –ľ–ĺ–∂–Ķ—ā –Ņ—Ä–ł–≤–Ķ—Ā—ā–ł –ļ –≤—č–Ņ—É—Ā–ļ—É PMSM –ł–∑ —Ā–ł–Ĺ—Ö—Ä–ĺ–Ĺ–ł–∑–į—Ü–ł–ł, —ā–ĺ –Ķ—Ā—ā—Ć –Ņ–ĺ—ā–Ķ—Ä—é —É–Ņ—Ä–į–≤–Ľ—Ź–Ķ–ľ–ĺ—Ā—ā—Ć.
–≤ –ļ–į—á–Ķ—Ā—ā–≤–Ķ –ī–į—ā—á–ł–ļ–į –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł—Ź —Ä–ĺ—ā–ĺ—Ä–į –ī–Ľ—Ź —ā—Ä–Ķ—Ö—Ą–į–∑–Ĺ—č—Ö –Ę—Ä–į–Ņ–Ķ—Ü–ł–Ķ–≤–ł–ī–Ĺ–ĺ–Ķ —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł–Ķ, –ĺ–Ī—č—á–Ĺ–ĺ –ł—Ā–Ņ–ĺ–Ľ—Ć–∑—É—é—ā—Ā—Ź —ā—Ä–ł –ī–į—ā—á–ł–ļ–į –•–ĺ–Ľ–Ľ–į, –≤—Ā—ā—Ä–ĺ–Ķ–Ĺ–Ĺ—č–Ķ –≤ —ć–Ľ–Ķ–ļ—ā—Ä–ĺ–ī–≤–ł–≥–į—ā–Ķ–Ľ—Ć, –ļ–ĺ—ā–ĺ—Ä—č–Ķ –Ņ–ĺ–∑–≤–ĺ–Ľ—Ź—é—ā –ĺ–Ņ—Ä–Ķ–ī–Ķ–Ľ–ł—ā—Ć —É–≥–ĺ–Ľ —Ā —ā–ĺ—á–Ĺ–ĺ—Ā—ā—Ć—é –ī–ĺ –Ņ—Ä–Ķ–ī–Ķ–Ľ–į ¬Ī 30 –≥—Ä–į–ī—É—Ā–ĺ–≤. –Ď–Ľ–į–≥–ĺ–ī–į—Ä—Ź —ć—ā–ĺ–ľ—É –ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ—é –≤–Ķ–ļ—ā–ĺ—Ä–ĺ–ľ —ā–ĺ–ļ–į —Ā—ā–į—ā–ĺ—Ä–į –∑–į–Ĺ–ł–ľ–į–Ķ—ā —ā–ĺ–Ľ—Ć–ļ–ĺ —ą–Ķ—Ā—ā—Ć –Ņ–ĺ–∑–ł—Ü–ł–Ļ –ī–Ľ—Ź –ĺ–ī–Ĺ–ĺ–≥–ĺ —ć–Ľ–Ķ–ļ—ā—Ä–ł—á–Ķ—Ā–ļ–ĺ–≥–ĺ –Ņ–Ķ—Ä–ł–ĺ–ī–į, –≤ —Ä–Ķ–∑—É–Ľ—Ć—ā–į—ā–Ķ –ļ–ĺ—ā–ĺ—Ä–ĺ–≥–ĺ –Ĺ–į—Ö–ĺ–ī–ł—ā—Ā—Ź –ļ—Ä—É—ā—Ź—Č–ł–Ļ –ľ–ĺ–ľ–Ķ–Ĺ—ā –Ņ—É–Ľ—Ć—Ā–į—Ü–ł–ł –Ĺ–į –í—č—Ö–ĺ–ī.

–ě—Ä–ł–Ķ–Ĺ—ā–ł—Ä–ĺ–≤–į–Ĺ –Ĺ–į –Ņ–ĺ–Ľ–Ķ –ö–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ć (FOC) –Ņ–ĺ–∑–≤–ĺ–Ľ—Ź–Ķ—ā –Ņ–Ľ–į–≤–Ĺ–ĺ, —ā–ĺ—á–Ĺ–ĺ –ł —Ā–į–ľ–ĺ—Ā—ā–ĺ—Ź—ā–Ķ–Ľ—Ć–Ĺ–ĺ –ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ–ł—Ä–ĺ–≤–į—ā—Ć —Ā–ļ–ĺ—Ä–ĺ—Ā—ā—Ć –ł –ļ—Ä—É—ā—Ź—Č–ł–Ļ –ľ–ĺ–ľ–Ķ–Ĺ—ā–ł–∑ –Ī–Ķ—Ā—Č–Ķ—ā–ĺ—á–Ĺ—č–Ļ –ľ–ĺ—ā–ĺ—Ä. –Ē–Ľ—Ź . –†–į–Ī–ĺ—ā–į –į–Ľ–≥–ĺ—Ä–ł—ā–ľ–į –ļ–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ź –ĺ—Ä–ł–Ķ–Ĺ—ā–ł—Ä–ĺ–≤–į–Ĺ–Ĺ–ĺ–≥–ĺ –Ĺ–į –ľ–Ķ—Ā—ā–į—Ö, –Ĺ–Ķ–ĺ–Ī—Ö–ĺ–ī–ł–ľ–ĺ –∑–Ĺ–į—ā—Ć –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł–Ķ —Ä–ĺ—ā–ĺ—Ä–į –Ī–Ķ—Ā—Č–Ķ—ā–ĺ—á–Ĺ—č–Ļ –ľ–ĺ—ā–ĺ—Ä.

–° . 1970-—Ö –≥–ĺ–ī–ĺ–≤ –ī–į—ā—á–ł–ļ –í–Ķ–ļ—ā–ĺ—Ä–Ĺ—č–Ķ –ľ–Ķ—ā–ĺ–ī—č —É–Ņ—Ä–į–≤–Ľ–Ķ–Ĺ–ł—Ź –Ď–Ķ—Ā—Č–Ķ—ā–ĺ—á–Ĺ—č–Ļ –į—Ā—Ā–ĺ—Ä—ā–ł–ľ–Ķ–Ĺ—ā –ľ–ĺ—ā–ĺ—Ä—č –°—ā–į–Ľ —Ä–į–∑—Ä–į–Ī–į—ā—č–≤–į—ā—Ć, –Ī–Ľ–į–≥–ĺ–ī–į—Ä—Ź –Ī—č—Ā—ā—Ä–ĺ–ľ—É —Ä–į–∑–≤–ł—ā–ł—é –ľ–ł–ļ—Ä–ĺ–Ņ—Ä–ĺ—Ü–Ķ—Ā—Ā–ĺ—Ä—č. –ü–Ķ—Ä–≤—č–Ļ –ī–į—ā—á–ł–ļ –ú–Ķ—ā–ĺ–ī—č –ĺ—Ü–Ķ–Ĺ–ļ–ł —É–≥–Ľ–į –Ī—č–Ľ–ł –ĺ—Ā–Ĺ–ĺ–≤–į–Ĺ—č –Ĺ–į —Ā–≤–ĺ–Ļ—Ā—ā–≤–Ķ —ć–Ľ–Ķ–ļ—ā—Ä–ĺ–ī–≤–ł–≥–į—ā–Ķ–Ľ—Ź, —á—ā–ĺ–Ī—č —Ā–ĺ–∑–ī–į—ā—Ć –ĺ–Ī—Ä–į—ā–Ĺ–ĺ EMF –≤–ĺ –≤—Ä–Ķ–ľ—Ź –≤—Ä–į—Č–Ķ–Ĺ–ł–Ķ. –ú–ĺ—ā–ĺ—Ä–Ĺ–ĺ–Ķ —É—Ā—ā—Ä–ĺ–Ļ—Ā—ā–≤–ĺ EMF —Ā–ĺ–ī–Ķ—Ä–∂–ł—ā –ł–Ĺ—Ą–ĺ—Ä–ľ–į—Ü–ł—é –ĺ –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł–ł —Ä–ĺ—ā–ĺ—Ä–į, –Ņ–ĺ—ć—ā–ĺ–ľ—É –Ņ—É—ā–Ķ–ľ –≤—č—á–ł—Ā–Ľ–Ķ–Ĺ–ł—Ź –∑–Ĺ–į—á–Ķ–Ĺ–ł—Ź –∑–į–ī–Ĺ–Ķ–Ļ –≠–Ē–° –≤ —Ā—ā–į—Ü–ł–ĺ–Ĺ–į—Ä–Ĺ–ĺ–Ļ —Ā–ł—Ā—ā–Ķ–ľ–Ķ –ļ–ĺ–ĺ—Ä–ī–ł–Ĺ–į—ā –≤—č –ľ–ĺ–∂–Ķ—ā–Ķ —Ä–į—Ā—Ā—á–ł—ā–į—ā—Ć –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł–Ķ Rotor. –Ě–ĺ –ö–ĺ–≥–ī–į –†–ĺ—ā–ĺ—Ä –Ĺ–Ķ –≤—Ä–į—Č–į–Ķ—ā—Ā—Ź, –∑–į–ī–Ĺ—Ź—Ź –≠–ú–° –ĺ—ā—Ā—É—ā—Ā—ā–≤—É–Ķ—ā, –ł –Ņ—Ä–ł –Ĺ–ł–∑–ļ–ĺ–Ļ —Ā–ļ–ĺ—Ä–ĺ—Ā—ā–ł –∑–į–ī–Ĺ—Ź—Ź –≠–ú–° –ł–ľ–Ķ–Ķ—ā –Ĺ–Ķ–Ī–ĺ–Ľ—Ć—ą—É—é –į–ľ–Ņ–Ľ–ł—ā—É–ī—É, —á—ā–ĺ —ā—Ä—É–ī–Ĺ–ĺ —Ä–į–∑–Ľ–ł—á–ł—ā—Ć –ĺ—ā —ą—É–ľ–į, –Ņ–ĺ—ć—ā–ĺ–ľ—É —ć—ā–ĺ—ā –ľ–Ķ—ā–ĺ–ī –Ĺ–Ķ –Ņ–ĺ–ī—Ö–ĺ–ī–ł—ā –ī–Ľ—Ź –ĺ–Ņ—Ä–Ķ–ī–Ķ–Ľ–Ķ–Ĺ–ł—Ź –Ņ–ĺ–Ľ–ĺ–∂–Ķ–Ĺ–ł—Ź —Ä–ĺ—ā–ĺ—Ä–į –ī–≤–ł–≥–į—ā–Ķ–Ľ—Ź –Ņ—Ä–ł –Ĺ–ł–∑–ļ–ĺ–ľ —Ā–ļ–ĺ—Ä–ĺ—Ā—ā–ł . .

–í –Ĺ–į—Ā—ā–ĺ—Ź—Č–Ķ–Ķ –≤—Ä–Ķ–ľ—Ź Sensorless –ĺ—Ä–ł–Ķ–Ĺ—ā–ł—Ä–ĺ–≤–į–Ĺ –Ĺ–į –Ņ–ĺ–Ľ–Ķ –ö–ĺ–Ĺ—ā—Ä–ĺ–Ľ—Ć PMSM –í –Ņ–ĺ–Ľ–Ĺ–ĺ–ľ –ī–ł–į–Ņ–į–∑–ĺ–Ĺ–Ķ —Ā–ļ–ĺ—Ä–ĺ—Ā—ā–Ķ–Ļ –≤–ĺ–∑–ľ–ĺ–∂–Ķ–Ĺ —ā–ĺ–Ľ—Ć–ļ–ĺ –ī–Ľ—Ź –ī–≤–ł–≥–į—ā–Ķ–Ľ–Ķ–Ļ —Ā –≤—č–ī–Ķ–Ľ–Ķ–Ĺ–Ĺ—č–ľ –Ņ–ĺ–Ľ—é—Ā–ĺ–ľ —Ä–ĺ—ā–ĺ—Ä.
–Ē–Ľ—Ź .–ó–į–Ņ—Ä–ĺ—Ā—č –ĺ –Ĺ–į—ą–ł—Ö –Ņ—Ä–ĺ–ī—É–ļ—ā–į—Ö –ł–Ľ–ł –Ņ—Ä–Ķ—Ä—č–≤–į–Ĺ–ł–ł, –Ņ–ĺ–∂–į–Ľ—É–Ļ—Ā—ā–į, –ĺ—Ā—ā–į–≤—Ć—ā–Ķ –Ĺ–į–ľ, –ł –ľ—č –Ī—É–ī–Ķ–ľ –Ĺ–į —Ā–≤—Ź–∑–ł –≤ —ā–Ķ—á–Ķ–Ĺ–ł–Ķ 24 –ß–į—Ā—č.





 –ü–ĺ–∑–≤–ĺ–Ĺ–ł—ā—Ć –≤ :
–ü–ĺ–∑–≤–ĺ–Ĺ–ł—ā—Ć –≤ :
–Ę–Ķ–Ľ–Ķ—Ą–ĺ–Ĺ : +8613860661520
 –°–≤—Ź–∂–ł—ā–Ķ—Ā—Ć —Ā –Ĺ–į–ľ–ł –Ņ–ĺ —ć–Ľ–Ķ–ļ—ā—Ä–ĺ–Ĺ–Ĺ–ĺ–Ļ –Ņ–ĺ—á—ā–Ķ :
–°–≤—Ź–∂–ł—ā–Ķ—Ā—Ć —Ā –Ĺ–į–ľ–ł –Ņ–ĺ —ć–Ľ–Ķ–ļ—ā—Ä–ĺ–Ĺ–Ĺ–ĺ–Ļ –Ņ–ĺ—á—ā–Ķ :
–≠–Ľ–Ķ–ļ—ā—Ä–ĺ–Ĺ–Ĺ–ĺ–Ķ –Ņ–ł—Ā—Ć–ľ–ĺ : ivy@tech-zy.com
 –ź–ī—Ä–Ķ—Ā :
–ź–ī—Ä–Ķ—Ā :
Floor 16 Building#3, No.136. Kuiqi Road, Mawei District, Fuzhou City, Fujian Province, China
¬© –ź–≤—ā–ĺ—Ä—Ā–ļ–ł–Ķ –Ņ—Ä–į–≤–į: 2026 Fujian ZY Electric & Machinery Technology Co.,Ltd –í—Ā–Ķ –Ņ—Ä–į–≤–į –∑–į—Č–ł—Č–Ķ–Ĺ—č.

IPv6 —Ā–Ķ—ā—Ć –Ņ–ĺ–ī–ī–Ķ—Ä–∂–ł–≤–į–Ķ—ā—Ā—Ź






